정의
Pose라는 용어는
Computer Vision, Augmented Reality, Computer Graphics, Robot Engineering 등에서
특정 object의
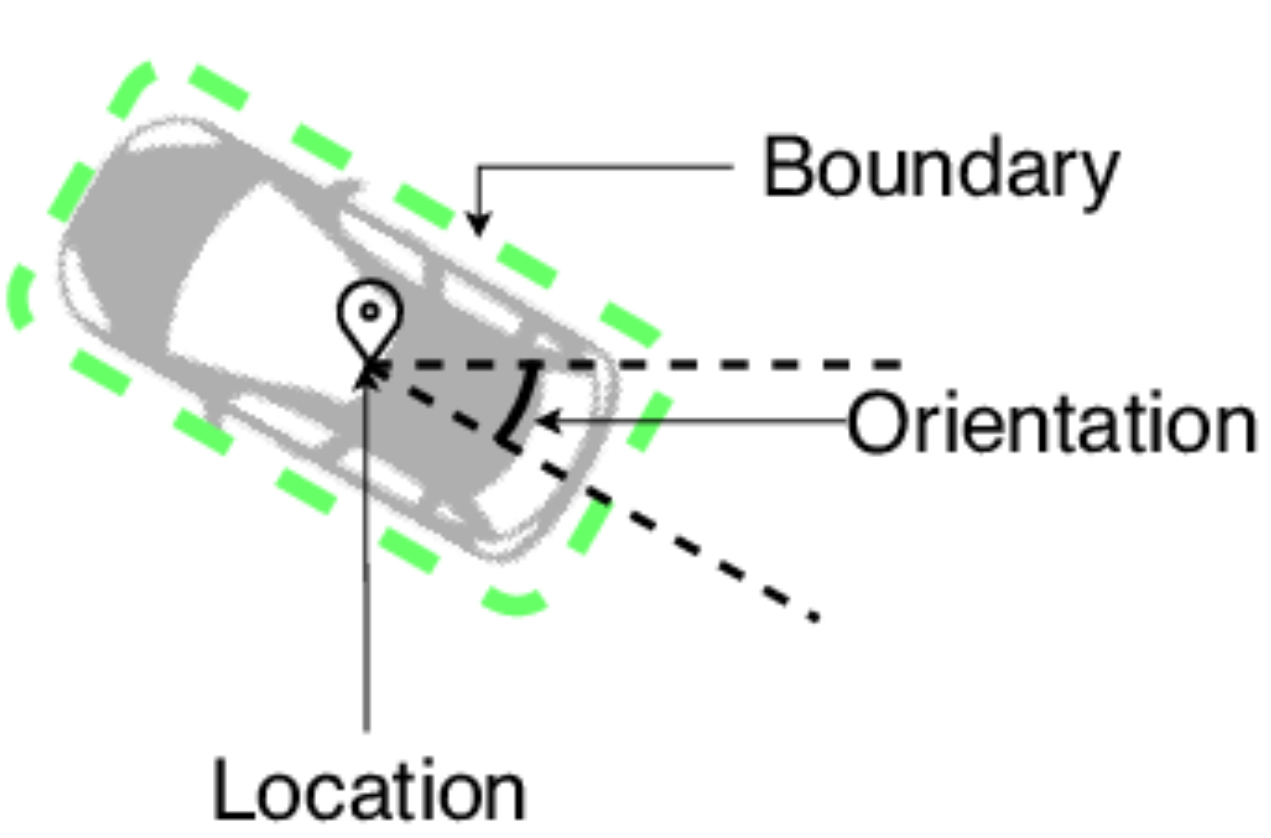
- 공간에서의 위치(position)와
- 해당 위치에서의 자세(or 방향, orientation)를
합친 개념임.
차량 등에서는 boundary를 추가하기도 함
Position(=location) + Orientation
- Position (위치)
- 3차원 공간에서의 object의 위치를 나타냄. 보통 x,y,z 좌표로 나타내어짐.
- Orientation (자세, 방향)
- Object의 방향으로 rotation matrix, Rodrigues angle, Euler angle, 또는 Quaternion 으로 나타내어짐.
Pose Estimation이라고 하면, 촬영 대상의 pose를 측정데이터로부터 추출하는 것을 주로 의미함.
Camera Calibration을 통해 보통 camera의 pose (~Extrinsic parameters)가 계산됨.
같이 보면 좋은 자료들
2024.07.07 - [Programming/DIP] - [Math] Euler Angles and Rotation Matrix
[Math] Euler Angles and Rotation Matrix
Euler Angle 과 Rotation Matrix Euler Angle 은 3차원 공간에서 객체의 orientation 및 rotation(회전)을 표현하는데 사용되는 방법임. 참고로 orientation을 나타내는데 Axis Angle도 많이 사용되고, rotation(회전)의
dsaint31.tistory.com
2023.08.05 - [.../Math] - [Math] Rotation Vector (= Axis-Angle, Rodrigues Angle)
[Math] Rotation Vector (= Axis-Angle, Rodrigues Angle)
3차원 공간에서의 rotation을 표현하는 방법.Euler angle과 함께 가장 많이 사용되는 방법 중 하나임.하지만 3개의 축에 대한 3개의 rotation angle로 표현하는 Euler angle과 달리,Rotation Vector는 하나의 vector
dsaint31.tistory.com
2024.06.22 - [Programming/DIP] - [CV] Geometric Camera Model
[CV] Geometric Camera Model
Geometric Camera Model (or Camera Model)은 real world 와 camera의 pose에 따라,real world 와 camera의 image 간의 관계를approximation 함. 이 문서에서는 기본적인 Pinhole Camera Model에 기반하여 설명함.Pinhole Camera Model
dsaint31.tistory.com
'Programming > DIP' 카테고리의 다른 글
| [CV] Example: Essential Matrix and Epipolar Line (2) | 2024.07.16 |
|---|---|
| [CV] Example: Fundamental Matrix and Epipolar Line (등극선) (1) | 2024.07.16 |
| [CV] Intrinsic Rotation and Extrinsic Rotation (Euler-Angle) (0) | 2024.07.07 |
| [Math] Euler Angles and Rotation Matrix (0) | 2024.07.07 |
| [CV] Perspective Projection (원근 투영법): Camera to Image (0) | 2024.07.06 |