Two View Geometry란?
Computer Vision 분야에서
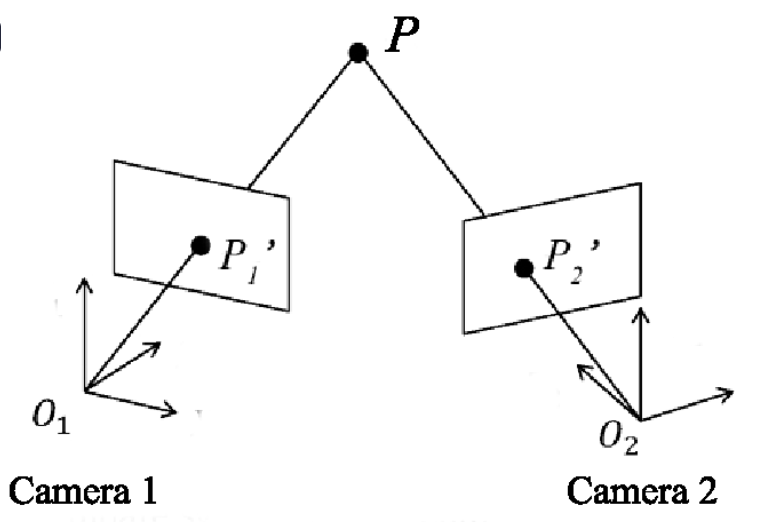
두 개의 다른 view로 촬영된 image 사이의 geometric relationship을 연구하는 주제가 바로 Two View Geometry임.
- 두 view로 촬영된 images 의 geometry relationship을 통해 3D 정보를 추출함.
주로
- Stereo Vision,
- Motion Estimation,
- Depth Estimation,
- 3D Reconstruction,
- Robotic Vision,
- Augmented Reality 등에서 사용됨.
주요개념
Two View Geometry는
- 3D 공간의 점들이 2D 이미지 평면에 어떻게 project되는지를 설명하는 Projective Geometry와
- (아래 그림에서 Camera Calibration에서 주로 사용됨)
- 두 개의 카메라 view사이의 기하학적 관계를 통해 correspondances를 찾고 이들의 matching을 통해
3D정보를 추출하는 Epipolar Geometry를
종합하여, 두 view의 카메라로 얻어진 이미지를 분석하고 이를 통해 다음과 같은 작업을 수행함.
- Fundamaental Matrix 및 Essential Matrix 추출
- Camera Pose Estimation
- Stereo Matching
- Triangulation (삼각측량)
관련된 URLs
2024.07.06 - [Programming/DIP] - [CV] Perspective Projection (원근 투영법): Camera to Image
[CV] Perspective Projection (원근 투영법): Camera to Image
Perspective Projection 3D 물체를 2D 평면에 투영하는 방법 중 하나를 의미함. 이는 컴퓨터 그래픽스, 디자인, 건축 등에서 주로 사용됨.기술적 정의:Perspective Projection은 원근법을 적용하여 3D 공간에 있
dsaint31.tistory.com
2024.06.28 - [Programming/DIP] - [CV] Epipolar Geometry [작성중]
[CV] Epipolar Geometry [작성중]
Epipolar GeometryEpipolar geometry는두 개의 카메라 images에서대응하는 점들 사이의 기하학적 관계를 설명하는 데 사용되는 용어Epipolar geometry는 각 카메라 image 상의 각 point(점)이 epipolar line을 통해 어떻
dsaint31.tistory.com
2024.06.29 - [Programming/DIP] - [CV] Stereo Vision: Stereo Matching, Triangulation, Depth Map
[CV] Stereo Vision: Stereo Matching, Triangulation, Depth Map
CV와 DIP에서 Stereo Vision은 같은 대상에 대해, 서로 다른 view point에서 촬영된 두 image(보통 좌우 두개의 카메라로 구성되는 binocular stereo pair image)를 사용하여 3D 정보(주로 depth map)를 추출하는 기
dsaint31.tistory.com
'Programming > DIP' 카테고리의 다른 글
| [CV] Coordinate Systems (0) | 2024.06.29 |
|---|---|
| [CV] Epipolar Geometry [작성중] (0) | 2024.06.28 |
| [CV] Camera Model Parameter Estimation: $\underset{\textbf{x}}{\text{argmin }} \mathbf{x}^\top A^\top A \mathbf{x}$ (0) | 2024.06.23 |
| [CV] Geometric Camera Model and Camera Calibration: Pinhole Camera (0) | 2024.06.22 |
| [Fitting] Hough Transform (0) | 2024.06.13 |