0. Pre-requiredments
0-1. Region of Convergence (ROC)
Laplace Transform의 ROC는 다음과 같은 특징을 가짐.
- 유한한 구간내에 존재하며 발산하지 않는 signal :
- ROC가 모든 s 평면에서 수렴.
- right-sided signal (어떤 값 이상의 구간에서 존재하는 signal) :
- ROC가 “경계선” 기준 오른쪽 평면에 위치함 ◀unilateral에서 주로 다루는 signal.
- 특정값 이상의 구간에서 signal이 존재하므로 해당 값에 의해 supression 정도를 결정하는 $\sigma$가 결정됨 : "경계선"
- 그리고 특정값 이상의 구간에서 signal이 존재하므로 해당 $\sigma$보다 커야 하며 이는 "경계선" 기준 오른쪽 평면이 ROC가 됨을 의미.
- left-sided signal (어떤 값 이하의 구간에서 존재하는 signal) :
- ROC가 “경계선” 기준 왼쪽 평면에 위치함.
- 특정값 이하의 구간에서 signal이 존재하므로 해당 값에 의해 supression 정도를 결정하는 $\sigma$가 결정됨 : "경계선"
- 그리고 특정값 이하의 구간에서 signal이 존재하므로 해당 $\sigma$보다 작아야 하며 이는 "경계선" 기준 왼쪽 평면이 ROC가 됨을 의미.
- two-sided signal : right-sided signal의 “경계선”이 left-sided signal의 “경계선”보다 작아야만 ROC가 존재. (띠의 형태로 나타남.)
일반적으로 Lapalce Transform은
Bi-lateral Laplace Transform이 아닌,
right-sided signal만을 다루는 Uni-lateral Laplace Transform 을 가르킴.
때문에 Poles와 Zeros를 다루는 아래 내용도 Uni-lateral Laplace Transform 에 해당하는 내용임.
0-2. Complex Exponential Function
다음의 URL의 내용을 통해 $s$를 지수로 삼는 compelx exponential function을 숙지하고 아래 poles and zeros 관련 내용을 볼 것.
https://bme808.blogspot.com/2022/10/ss-complex-exponential-function.html
SS : Complex Exponential Function
다음과 같이 $s$가 complex number(복소수)인 경우를 complex exponential function이라고 함. $$e^{st}\quad, s=\sigma + j\Omega$$ $s$가 순수하게 imaginary component...
bme808.blogspot.com
좀더 자세한 건 다음을 참고
2023.09.19 - [.../Signals and Systems] - [SS] Complex Exponential Signals
[SS] Complex Exponential Signals
Continuous-time Sinusoidal Signal 주기신호 Continuous-time sinusoidal signal은 특정 angulary frequency $\omega$와 phase $\phi$, 그리고 amplitude $A$로 정의된다. $$ A\sin (\omega t+\phi) \\ A\cos(\omega t+ \phi)$$ 이를 exponent가 imaginar
dsaint31.tistory.com
1. Pole and Zero
1-1. pole (극)
- s평면에서 transfer function의 값이 $\infty$가 되는 점 (분모가 0)
- transfer function의 분모 $D(s)=0$ (◁특성방정식)을 만족 : “특성근”.
- Transfer function이
- 미분방정식에서 left-side가 출력, output-side가 입력 신호에 대한 항으로 정리한 이후 구해지므로,
- 분모 $D(s)$는 left-side에 해당하며 실제 구하고자 하는 $y(t)$와 관련된 항들임.
- input $x(t)$와 상관없는 항으로 system mode에 해당함.
- complex number인 경우, 이의 complex conj.도 근임. (LTI시스템의 미분방정식의 계수가 real임을 잊지 말것)
- 시스템의 transient response(과도 응답), stability(안정도) 등 시스템 동작 특성 (=System mode)을 결정
- 임펄스 응답의 형태 결정 (∵임펄스 응답은 시스템 모드들의 선형 결합)
1-2. zero (영점)
- s평면에서 transfer function의 값이 0이 되는 점
- transfer function의 분자 $N(s)=0$ 을 만족하는 점
- complex number인 경우, 이의 complex conj.도 근임. (LTI시스템의 미분방정식의 계수가 real임을 잊지 말것)
- “시스템”과 “입력”의 Interaction(연관 작용) 을 결정: gain 및 resonance freq. 등등에도 영향을 줌.
2. Pole에 따른 impulse response 의 형태 : Stability
impulse response는 input signal의 유형에 상관없음.
즉, system mode로만 구성됨.
때문에 pole만으로 impulse response의 대략적인 형태를 가늠할 수 있음. (pole이 중요한 이유)
Laplace Transform과 inverse Laplace Transform은 다음과 같음.
$$ F(s)=\int^{\infty}{0}f(t)e^{-st}dt\quad,s=\sigma +j\Omega\\f(t)=\frac{1}{2\pi j}\int^{c+j\Omega}{c-j\Omega} F(s)e^{st}ds $$
- Pole이 허축에서 멀리 떨어질수록, $\sigma$의 절대값이 커지며 이는 매우 빨리 diverge하거나 converge함을 의미.
- Pole이 실축에서 멀리 떨어질수록, high frequency를 의미하며 이는 진동의 주기가 매우 짧어짐을 말함.
2-1. Pole의 실수 성분 ($\sigma$)에 의한 특성
pole이
s평면의 허수축 (일반적으로 y축) 을 기준으로
- 오른쪽이냐 (diverge = Unstable!)
- 왼쪽이냐 (converge = Stable!)
- 허수축에 존재하냐 (constant, 단 중근인 경우 제외)
에 따른 특성임.
주로 impulse response의 envelop의 수렴과 발산 여부 및 속도를 결정.
2-1-1. Pole이 s평면의 “우반면”에 있는 경우.
impulse response가 Diverge (발산): unstable.
- 이 경우, $f(t)$가 converge하려면, $e^{st}$가 $F(s)$보다 빠르게 감쇠해야 한다.
- 즉, Pole은 음수(=좌반면)여야만 converge가 가능하지 만약 양수(=우반면)라면 반드시 diverge할 수 밖에 없음.
2-1-2. Pole이 “좌반면”에 있다면,
impulse response는 converge.
2-1-3. Pole이 imaginary axis(허축)에 있다면,
$\sigma=0$인 경우로 Fourier transform에 해당.
이 경우, pole이 0에서의 중근(repeated pole)이 아니라면, impulse response는 발산이나 수렴하지 않음.
참고로 pole이 0에서 중근인 경우에는
다음의 Laplace Transform의 관계 $t^n u(t) \leftrightarrow \frac{n!}{s^{n+1}}$ 에서 $n=1$인 경우로써,
$t u(t)$ 가 impulse response가 된다.
즉, $t$가 커질수록 같이 커지기 때문에 발산하는 함수(이 경우, ramp)가 됨.

다중극이 많아질수록 적분이 보다 많이 적용되며 시간 $t$가 커질수록 폭발적으로 더 많이 증가하는 발산이 됨.
- $\frac{1}{s}$ 는 1차 적분기로 step response: $e^{at}u(t)\big|_{a=0}$
- $\frac{1}{s^2}$는 2차 적분기로 ramp response: $te^{at}u(t) \big|_{a=0} $
- $\frac{1}{s^3}$는 3차 적분기로 parabola response: $\frac{t^2}{2!}e^{at}u(t) \big|_{a=0} $
다음의 Laplace Transform의 일반형을 보면 이를 쉽게 알 수 있음:
$$\frac{1}{(s-a)^n} \leftrightarrow \frac{t^{n-1}}{(n-1)!}e^{at}u(t)$$
2-2. Pole의 허수 성분 ($\omega$)에 의한 특성
Pole이 Complex conjugate root인 경우로서
s평면의 실수축 (일반적으로 x축) 을 기준으로
- 가까이 존재하는 경우 (저주파)
- 멀리 존재하는 경우 (고주파)
- 실수축에 존재하는 경우 (DC)
에 따른 특성임.
즉, Pole이 허수 성분이 0이 아닌 경우, impulse response에 fluctuation이 생긴다.
- 이경우, inverse Laplace transform에서 보이듯이 $e^{st}$부분이 주기함수 (or 특정 주파수)를 가지게 됨.
- envelop는 pole이 Right half(발산), Left half(수렴) 또는 허축(constant, 일정)에 있느냐로 결정되며, 실수근이 아닌 complex conjugate root를 가지는 경우 해당 envelop를 보이는 진동하는 함수가 된다.
- 당연히 실수축에서 멀리 떨어진 허수성분을 가질수록 빠른 진동수(high freq.)를 가짐.
3. Pole과 Impulse Response 종합.
Pole이 허축에서 멀리 떨어질수록, $\sigma$의 절대값이 커지며 이는 매우 빨리 diverge하거나 converge함을 의미.
- s평면의 우반면인 경우 diverge: unstable4
- s평면의 좌반면인 경우 converge
- 허축에서 멀어질수록 수렴 또는 발산 속도가 커짐.
Pole이 실축에서 멀리 떨어질수록, high frequency를 의미하며 이는 진동의 주기가 매우 짧어짐을 말함.
- complex conjugate도 역시 pole이 되므로 실수축을 기준으로 위아래 대칭으로 pole이 존재.
- 멀어질수록 높은 주파수의 fluctuation이 발생함.
다음 그림은 위의 특성을 간략히 나타냄(complex conjugate 중 하나만 나타냄)
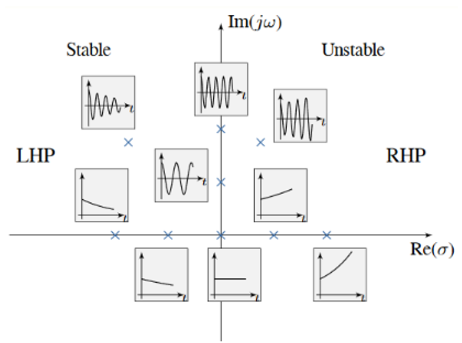
다음 그림은 poles 위치에 따른 impulse response의 특징을 잘 나타내준 그림임.

즉, System이 BIBO 안정하려면 characteristic eq.의 근(= pole)들이 s평면의 좌측 반평면에 있어야 함.
System이 안정하려면
ROC는 $\text{Re}(s) < \sigma$ 형태로, s-평면에서 실수부가 음수인 영역을 포함해야 함.
ROC 내부에 pole이 존재할 경우, pole에서 발산하기 때문에 불안정함.
4. Poles and Zeros : Frequency Response
Transfer function에서 Pole과 zero들을 적절히 배치할 경우, 원하는 Frequency response를 얻을 수 있음.
System design은
원하는 frequency response를 가지도록
pole과 zero들을 적절히 배치하는 작업임.
4-1. Frequency response와 Transfer function
수식으로 보면 다음과 같이 정리할 수 있음.
$$\begin{aligned}H(s) &=\frac{N(s)}{D(s)}\\ &=b_n\frac{(s-z_1)\cdots(s-z_n)}{(s-p_1)\cdots (s-p_n)} \\ H(\Omega)&={\left. H(s)\right |} _{s=j\Omega} = {\left.b_n\frac{(s-z_1)\cdots(s-z_n)}{(s-p_1)\cdots (s-p_n)}\right|} _{s=j\Omega}\end{aligned}$$
결국 Transfer function을 통해 Frequency Response 를 구할 수 있음. ($s=j\Omega$로 제한하면 됨)
이는 poles와 zeros에 의해 Frequency response 가 결정됨을 의미함.
즉, Frequency에 따른 amplitude response와 phase response가 결정됨.
4-2. Amplitude Response : Zeros와 Poles
$$\begin{aligned}|H(\Omega)| &= \left.b_n\frac{|(s-z_1)|\cdots|(s-z_n)|}{|(s-p_1)|\cdots |(s-p_n)|}\right| _{s=j\Omega}\\ &=\left.b_n\frac{\prod^n_{i=1}|j\Omega-z_i|}{\prod^n_{i=1}|j\Omega-p_i|}\right|_{s=j\Omega}\end{aligned}$$
- $|j\Omega-z_i|$는 결국 $j\Omega$와 zero의 거리에 해당함.
- $|j\Omega-p_i|$는 결국 $j\Omega$와 pole의 거리에 해당함.
결국, 특정 frequency에서의 gain $|H(\Omega)|$는
- zero와의 거리들의 곱(위의 식에서 분자)이 클수록 증가하고,
- pole과의 거리들의 곱(위의 식에서 분모)이 클수록 감소함.
4-3. Phase Response : Zeros와 Poles
$$\begin{aligned} H(\Omega)&={\left. b_n\frac{(s-z_1)\cdots(s-z_n)}{(s-p_1)\cdots (s-p_n)} \right| } _{s=j\Omega} \\ \\ \angle H(\Omega) &= { \left. \left\{\angle(s-z_1)+\cdots\angle (s-z_n)\right\}-\left\{\angle(s-p_1)+\cdots\angle (s-p_n)\right\} \right|} _{s=j\Omega}\end{aligned}$$
결국 phase response는 다음과 같이 일반화 가능함.
$$\angle H(\Omega)=\sum^n_{i=1}\angle(j\Omega-z_i)-\sum^n_{i=1}\angle(j\Omega-p_i)$$
4-4. Example
다음 그림은 $s$가 $p$인 경우의
amplitude response와 phase response의 예를 보여줌.
- $s=p$인 경우이며, pole과 zero가 2개씩 존재하는 경우의 amplitude와 phase response를 보여줌.
- real axis를 0도로 ccw로 phase를 구함.
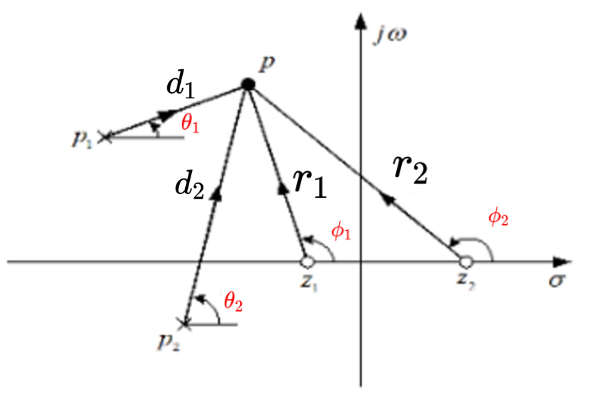
$$ \|H(s)\|_{s=p} = \frac{ r_1 r_2 }{ d_1 d_2} $$
$$ \left. \angle H(s) \right | _{s=p} = \phi_1+\phi_2 - \theta_1 -\theta_2 $$
5. 시스템의 Resonance Frequency 결정 : Poles and Zero.
Poles와 Zeros에 의해 Resonance Frequency가 결정됨.
Resonance frequency란 amplitude gain이 가장 큰 주파수를 의미함.
5-1. Pole의 경우,
pole과의 거리가 최소가 되는 frequency일수록 amplitude gain이 증가함.
아래 그림에서 $\omega_0$가 resonance freq.에 해당.
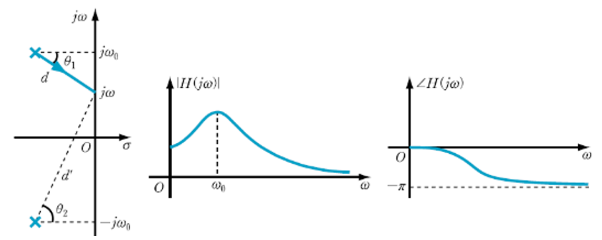
- $s=j\omega$로 imaginary axis에 위치할 경우 $s=\pm \omega_0$인 경우 가장 gain이 큼.
- zero와 pole의 거리로 gain이 결정된다는 점을 명심.
Pole은 resonance frequency 부근에서 gain을 증가시키는 “주파수 선택적” 동작을 보임. → peak생성
Pole의 허수성분에 의해 magnitude spectrum의 peak가 결정됨
Pole이 imaginary axis에 가까울수록 gain은 증가하며, 중복근인 경우 이같은 주파수 선택적 효과가 향상됨 .
5-2. Zero의 경우,
frequency response에서 pole과 반대되는 작용을 수행함.
zero의 허수성분에 해당하는 frequency (아래 왼쪽과 가운데 그림 참고)에서 gain이 가장 억제되는 “주파수 선택적” 동작을 보임. → valley생성.

zero가 imaginary axis에 가까울수록 gain이 작아짐(gain 억제효과 증가).
pole과 마찬가지로 중복근(중복영점)일 경우 해당 주파수 선택 효과가 향상됨.
References
다음 책의 8장을 정리함.
https://m.hanbit.co.kr/store/books/book_view.html?p_code=B9532349674
IT CookBook, 핵심이 보이는 신호 및 시스템 : 기본 이론부터 MATLAB 실습까지
이 책은 전기전자/정보통신 관련 학과 학생들을 대상으로, 제어, 신호 처리, 통신을 비롯한 다양한 분야에서 신호와 시스템을 해석하고 설계하는 데 기초가 되는 내용을 엄선하여 다룬다. 먼저,
m.hanbit.co.kr
https://tex.stackexchange.com/questions/512942/tikz-impulse-response-vs-pole-location
Tikz: Impulse response vs. pole location
I'm wondering how getting started to type this Impulse response vs. pole location map in Tikz. it is very similar to the Poincaré-Diagram at: http://www.texample.net/tikz/examples/poincare/ som...
tex.stackexchange.com
https://dsaint31.tistory.com/pages/SS-Laplace-Transform#6.%20Poles%20and%20Zeros-1
[SS] Laplace Transform
0. Prequisites2022.10.12 - [.../Signals and Systems] - [SS] Dirichlet Conditions (디리클레 조건) [SS] Dirichlet Conditions (디리클레 조건)Fourier Series (FS) or Fourier Transform (FT) 이 converge(수렴)할 sufficient condition(충분 조건).
dsaint31.tistory.com
'... > Signals and Systems' 카테고리의 다른 글
| [SS] Discrete Time Fourier Transform (1) | 2023.12.03 |
|---|---|
| [SS] Discrete Sinusoidal Function : $2\pi$ 주기성 (1) | 2023.11.30 |
| [SS] Parallel Connection : Transfer Function (0) | 2023.11.16 |
| [SS] Cascade Connection : Transfer Function (1) | 2023.11.16 |
| [SS] System Representation w/ Laplace Transform (0) | 2023.11.16 |