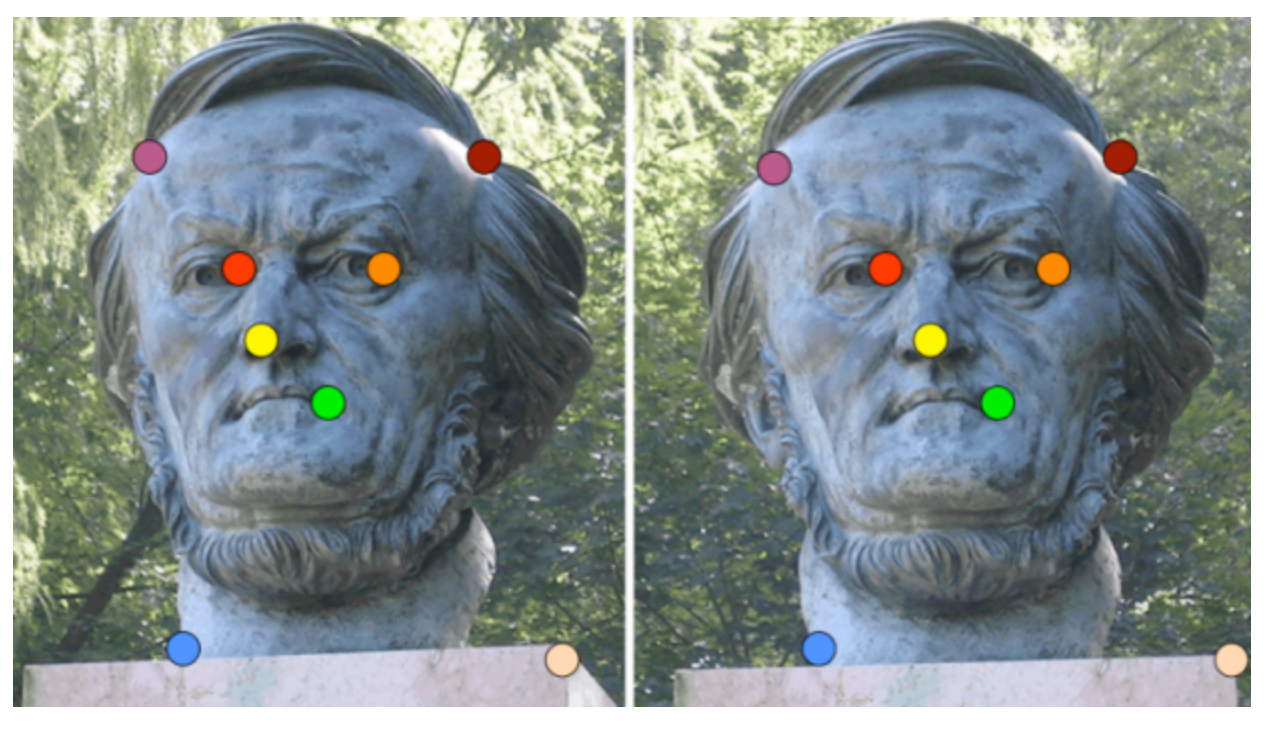
1. SIFT 등을 이용하여 reliable corresponding features 를 8쌍 이상 추출.
2. 1번 과정에서 찾은 correspondance에 Epipolar Constraint를 적용하여 matrix equation을 얻음.
2024.06.28 - [Programming/DIP] - [CV] Epipolar Geometry [작성중]
[CV] Epipolar Geometry [작성중]
epipolar geometry는두 개의 카메라 images에서대응하는 점들 사이의 기하학적 관계를 설명하는 데 사용되는 용어Epipolar geometry는 각 카메라 image 상의 각 점이 epipolar line을 통해 어떻게 연결되었는지를
dsaint31.tistory.com
예를 들어 $i$-th correspondance $(\mathbf{p}_R^{(i)}, \mathbf{p}_L^{(i)})$에 다음이 성립.
$${\mathbf{p}_L^{(i)}}^\top \mathbf{F} {\mathbf{p}_R^{(i)}}= 0$$
이를 풀어서 쓰면 다음과 같음.
$$\begin{bmatrix} u_L^{(i)} & v_L^{(i)} & 1 \end{bmatrix} \begin{bmatrix} f_{11} & f_{12} & f_{13} \\ f_{21} & f_{22} & f_{23} \\ f_{31} & f_{32} & f_{33}=1 \end{bmatrix} \begin{bmatrix} u_R^{(i)} \\ v_R^{(i)} \\ 1 \end{bmatrix} = 0$$
위 matrix equation은 다음의 linear equation과 같음.
$$(f_{11}u_R^{(i)}+f_{12}v_r^{(i)}+f_{13})u_L^{(i)} +(f_{21}u_R^{(i)}+f_{22}v_R^{(i)}+f_{23})v_L^{(i)}+(f_{31}u_R^{(i)}+f_{32}v_R^{(i)}+f_{33})=0$$
8개의 coorespondance를 모두 사용하면 다음을 얻음.
$$\begin{bmatrix} u_R^{(1)}u_L^{(1)} & v_R^{(1)}u_L^{(1)} & u_L^{(1)} & u_R^{(1)}v_L^{(1)} & v_R^{(1)}v_L^{(1)} & v_L^{(1)} & u_R^{(1)} & v_R^{(1)} & 1 \\ \vdots &\vdots &\vdots &\vdots &\vdots &\vdots &\vdots &\vdots &\vdots \\ u_R^{(8)}u_L^{(8)} & v_R^{(8)}u_L^{(8)} & u_L^{(8)} & u_R^{(8)}v_L^{(8)}& v_R^{(8)}v_L^{(8)} & v_L^{(8)} & u_R^{(8)} & v_R^{(8)} & 1 \end{bmatrix} \begin{bmatrix} f_{11} \\ f_{12} \\f_{13}\\f_{21}\\f_{22}\\f_{23}\\f_{31}\\f_{32}\\f_{33}=1 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \\ 0 \end{bmatrix}$$
이를 다음과 같이 기재할 수 있음.
$$\mathbf{A} \mathbf{f} = \mathbf{0}$$
여기서 $\mathbf{A}$는 8쌍의 correspondance로 부터 구할 수 있고, zero vector $\mathbf{0}$는 상수이므로, unknown이 8개인 $\mathbf{f}$를 충분히 구할 수 있음.
3. Fundamental Matrix는 scale ambiguity 를 통해 $\|\mathbf{f}\|^2=1$이라는 constraint를 주어 하나의 $\mathbf{F}$를 얻도록 함.
$${ \mathbf{p}_L^{(i)} }^\top \mathbf{F} \mathbf{p}_R^{(i)} = 0 ={\mathbf{p}_L^{(i)} }^\top k \mathbf{F} \mathbf{p}_R^{(i)}$$
$\mathbf{F}$와 $k\mathbf{F}$는 같은 epipolar geometry에 해당하므로, scale을 고정하여 하나의 $\mathbf{F}$를 구해야함.
때문에 $\|\mathbf{f}\|^2=1$을 앞서 구한 equation의 constraint로 추가함.
4. 이는 다음의 constrained least squares problem이 유도됨.
$\|\mathbf{f}\|^2=1$이라는 제한 조건 하에서 이상적으로 $\mathbf{A}\mathbf{f}=0$이 만족하는 $\mathbf{f}$를 구해야 하나,
측정의 noise 등으로 인해 최대한 0에 가까워지도록 해주는 $\mathbf{f}$를 구하면 됨.
이는 다음과 같은 constrained minization problem이 된다.
$$\underset{\mathbf{f}} {\text{argmin }} \|\mathbf{Af}\|^2 \text{ s.t. } \|f\|^2=1$$
이는 constrained least squares 등의 Direct Linear Transform을 푸는 방법으로 쉽게 $\mathbf{f}$를 구할 수 있음을 뜻함.
2024.07.16 - [분류 전체보기] - [ML] Constrained Least Squares: Lagrangian 을 활용.
[ML] Constrained Least Squares: Lagrangian 을 활용.
문제설정흔히 볼 수 있는 least squares problem은 다음과 같음.$$\mathbf{A'f'}=\mathbf{b}$$ 이를 다음과 같이 augmented matrix와 homogeneous coordinate를 사용하여 homogeneous equation형태로 정리할 수 있음.$$ \mathbf{A} =
dsaint31.tistory.com
실제로는 u-v pixel coordinates를 그대로 사용하지 않고,
Hartley's normalization을 수행하여 normalizaed constrained least squares 를 함.
(이 경우 수치적인 안정성이 보다 높음)
2024.07.17 - [Programming/DIP] - [CV] Hartley’s Normalization
[CV] Hartley’s Normalization
Hartley’s NormalizationHartley's normalization은 Stereo Calibration의 Fundamental Matrix를 구하는데 주로 사용되는 normalization으로 기하학적 좌표들을 다룰 때 수치적 안정성을 확보하기 위해 애용됨. Hartley의 nor
dsaint31.tistory.com
least square로 구해진 $\hat{\mathbf{f}}$를 rearrange하여 구한 $\hat{\mathbf{F}}$는 singular matrix가 아닐 수 있음(noise 등으로 인해).
때문에 $\text{det } F$ 가 되도록 rank-2 approximation을 수행하기도 함.
마지막으로 least squares를 수행하기 전의 normalization을 되돌리기 위한 denoramlization을 수행하여 $\mathbf{F}$를 구함.
5. 각 카메라의 intrinsic parameters $\mathbf{K}_L$와 $\mathbf{K}_R$ 를 통해 Essential Matrix $\mathbf{E}$를 구함.
$$\mathbf{E}=\mathbf{K}_L^\top \mathbf{F} \mathbf{K}_R$$
2024.06.22 - [Programming/DIP] - [CV] Geometric Camera Model
[CV] Geometric Camera Model
Geometric Camera Model (or Camera Model)은 real world 와 camera의 pose에 따라,real world 와 camera의 image 간의 관계를approximation 함. 이 문서에서는 기본적인 Pinhole Camera Model에 기반하여 설명함.Pinhole Camera Model
dsaint31.tistory.com
6. $\mathbf{E}$로부터 SVD를 통해, $\mathbf{R}$과 $\mathbf{t}$를 구한다.
$$ \mathbf{E} = [\mathbf{t}]_\times \mathbf{R}$$
2024.06.28 - [Programming/DIP] - [CV] Epipolar Geometry [작성중]
[CV] Epipolar Geometry [작성중]
epipolar geometry는두 개의 카메라 images에서대응하는 점들 사이의 기하학적 관계를 설명하는 데 사용되는 용어Epipolar geometry는 각 카메라 image 상의 각 점이 epipolar line을 통해 어떻게 연결되었는지를
dsaint31.tistory.com
같이 보면 좋은 자료들
https://velog.io/@cjkangme/CS231A-%EA%B0%95%EC%9D%98-%EB%85%B8%ED%8A%B8-3-epipolar-geometry-2
CS231A 강의 노트 3 - epipolar geometry (2)
이전 게시글 4. Fundamental Matrix Essential Matrix를 구할 때에는 두 카메라가 canonical camera라고 가정하였다. 그러나 현실의 카메라에 적용하기 위해서는 canonical이 아닌 카메라에 대응하는 Matrix가 필요
velog.io
'Programming > DIP' 카테고리의 다른 글
| [CV] Depth Cameras (1) | 2024.07.17 |
|---|---|
| [CV] Hartley’s Normalization (1) | 2024.07.17 |
| [CV] Stereo Calibration or Stereo Camera Calibration (0) | 2024.07.16 |
| [CV] Example: Essential Matrix and Epipolar Line (2) | 2024.07.16 |
| [CV] Example: Fundamental Matrix and Epipolar Line (등극선) (1) | 2024.07.16 |