Definition of Vector Function
A vector function is simply a function whose codomain(공역) is $\mathbb{R}^n$.
In other words, rather than taking on real values, it takes on vector values.
We will often use the notation $\vec{v} = \vec{v}(t)$ to denote a vector function.
Note:
일반적으로 vector function은 많은 책에서 $\textbf{r}(t)$ 로 표현됨.
이를 수식적으로 표현하면 다음과 같음.
$$
\begin{aligned}
\vec{v} &= \vec{v}(t) \\
&=\textbf{v}(t)\\
&= P(t) \vec{i} + Q(t)\vec{j} + R(t)\vec{k}\\
\end{aligned}
$$
벡터 $\vec{v}$ 를 base unit vector로 표현한 위의 식에서 각 component, $P(t),Q(t),R(t)$가 임의의 변수 $t$에 의한 function일 경우 vector function이라고 함.
일반적 vector function의 표현식 (Cartesian coordinate system)
$$
\begin{aligned}
\vec{v} &= \vec{v}(t) \\
&= \textbf{v}(t) = \left< P(t), Q(t), R(t) \right> \\
&= P(t)\vec{i} +Q(t)\vec{j}+R(t)\vec{k}
\end{aligned}
$$
Note: Scalar function
A scalar function is simply a function whose codomain(공역) is $\mathbb{R}$.
$f=f(p_{\text{parameters}})= f(x,y,z) = \text{Scalar}$
함수의 값이 Scalar로 주어짐
Limit of Vector Function
Vector function $\vec{v} = \left< P(t), Q(t),R(t) \right>$ 에 대하여 $t=a$에서 $\vec{v}(t)$의 limit은 다음과 같이 정의함.
$$\begin{aligned}
\lim_{t\rightarrow a}\vec{v}(t) = \left< \lim_{t\to a}P(t), \lim_{t\to a}Q(t), \lim_{t\to a}R(t) \right>
\end{aligned}$$
- Vector function $\vec{v} =\left<P(t),Q(t),R(t)\right>$ 의 limit(극한)은 component function $P(t),Q(t),R(t)$의 limit을 이용하여 정의함.
Continuity of Vector Function
Vector function $\vec{v} =\left<P(t),Q(t),R(t)\right>$ 가 $t=a$에서 연속(continuity)이라면, 다음을 모두 만족해야 함.
- $\displaystyle{\lim_{t\rightarrow a} \vec{v}(t)}$ 가 존재함.
- $\vec{v}(a)$가 존재함.
- $\displaystyle{\lim_{t\rightarrow a} \vec{v}(t) = \vec{v}(a)}$가 성립.
Derivative of Vector Function
Vector function $\vec{v}(t)$의 derivative(도함수), $\vec{v}^\prime(t)$는 다음과 같이 정의됨.
$$
\begin{aligned}
\vec{v}^\prime = \lim_{\Delta t\to 0} \frac{\vec{v}(t+\Delta t)-\vec{v}(t)}{\Delta t}
\end{aligned}
$$
- $\vec{v}^\prime(t)$는 tangent vector라고도 불림.
component function 을 이용하여 derivative of vector function을 구하는 건 다음과 같음.
$$
\begin{aligned}
\vec{v}^\prime = \left< P'(t), Q'(t), R'(t) \right>
\end{aligned}
$$
다음의 법칙들이 성립.
$$
\begin{aligned}
(u+v)^\prime &= u'+v' \\
(u \cdot v)^\prime &= u^\prime\cdot v +u\cdot v^\prime \\
(u \times v)^\prime &= u^\prime \times v + u \times v^\prime \\
(u v w)^\prime &= (u^\prime v w) + (u v^\prime w) + (u v w^\prime)
\end{aligned}
$$
Unit Tangent Vector
Tangent vector (derivative of vector function)를 자신의 norm (크기,L2-norm)으로 나눈 것.
즉, 크기가 1인 tangent vector.
$$
\begin{aligned}
T(t) = \frac{v'(t)}{\|v'(t)\|_2} = \frac{v'(t)}{|v'(t)|}
\end{aligned}
$$
Tangent vector의 norm은 다음과 같음.
$$
\begin{aligned}
\| v'(t) \|_2 = \sqrt{P'(t)^2 + Q'(t)^2 + R'(t)^2}
\end{aligned}
$$
Definite Integral of Vector Function
Vector function $\vec{v} = \left< P(t), Q(t),R(t) \right>$가 구간 $[t_1, t_2]$에서 연속(continuity)일 때, 구간 $[t_1, t_2]$에서 $\vec{v}$의 definite integral(정적분) 은 다음과 같이 정의됨.
$$ \int^{t_2}_{t_1} \vec{v}(t) dt = \left< \int^{t_2}_{t_1} P(t) dt, \int^{t_2}_{t_1} Q(t) dt, \int^{t_2}_{t_1} R(t) dt \right>$$
Position Vector를 이용한 곡선, 직선, 타원(원 포함)의 표현
3차원 공간에서 곡선 $C$의 방정식
$$
\begin{aligned}
\vec{v} = v(t) &= \left< a(t), b(t), c(t) \right> \\
&= a(t)\vec{i} +b(t)\vec{j}+c(t)\vec{k}
\end{aligned}
$$
- $t$ 가 증가할 때 곡선의 방향이 positive direction.
- $t$ 가 감소할 때 곡선의 방향이 negative direction.
3차원 공간에서 직선의 방정식
- 점 $\vec{q}=\left< q_x, q_y,q_z \right>$ (=position vector)를 지나고
- constant vector $\vec{g}=\left< g_x, g_y,g_z \right>$의 방향으로 진행하는 직선
$$
\begin{aligned}
\vec{v} &= \vec{q}+\vec{g}t \\
&= v(t) \\
&= \left< q_x+g_x t, q_y+g_y t,q_z+g_z t \right>
\end{aligned}
$$
x-y 평면에서 타원 혹은 원의 방정식
$$
\begin{aligned}
\vec{v} &= a \cos{t}\vec{i} + b \sin{t} \vec{j} \\
&= \left< a \cos{t}, b \sin{t}\right>
\end{aligned}
$$
sol.
$$
\begin{aligned}
x(t) = a \cos{t}, &\quad y(t) = b \sin{t} \\
\cos{t} = \frac{x(t)}{a}, &\quad \sin{t} = \frac{y(t)}{b} \\
\cot^2{t} = \frac{x(t)^2}{a^2}, &\quad \sin^2{t} = \frac{y^2(t)}{b^2} \\
\\
\cot^2{t} + \sin^2{t} &= \frac{x^2(t)}{a^2} + \frac{y^2(t)}{b^2} \\
1 &= \frac{x^2(t)}{a^2} + \frac{y^2(t)}{b^2} \\
\end{aligned}
$$
즉, 위는 타원의 방정식.
만약, $a=b$라면,
$$
\begin{aligned}
1 &= \frac{x^2(t)}{a^2} + \frac{y^2(t)}{b^2} \\
1 &= \frac{x^2(t)}{a^2} + \frac{y^2(t)}{a^2} \\
x^2(t)+y^2(t) &= a^2
\end{aligned}
$$
즉, 원의 방정식.
Velocity and Acceleration
앞에서 보였듯이 시간에 따라 변하는 특정 물체의 위치를 position vector를 이용하여 표현 가능.
(움직인 track이 곡선, 직선, 타원 등등인 경우를 앞에서 보인 방식으로 표현가능)
또한 vector를 통해 velocity와 acceleration을 구할 수 있음.
Velocity Vector and Acceleration Vector
Position vector $\vec{r} (t)$에 대한 velocity vector $v(t)$와 acceleration vector $a(t)$, speed $v(t)$ 는 다음과 같음.
$$
\begin{aligned}
\vec{v}(t) &= \displaystyle{\lim_{\Delta t\rightarrow 0} \frac { \vec{r}(t+\Delta t) - \vec{r}(t)}{\Delta t}} =\vec{r}'(t)\\
\vec{a}(t) &= \displaystyle{\lim_{\Delta t\rightarrow 0} \frac { \vec{v}(t+\Delta t) - \vec{v}(t)}{\Delta t}} =\vec{v}'(t) =\vec{r}''(t) \\
v(t) &= \left| \vec{v}(t) \right|
\end{aligned}
$$
Normal(법선) Vector
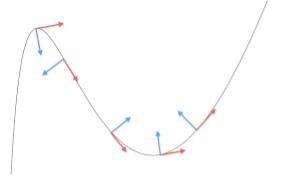
- $\vec{T}^\prime(t)$를 normal vector라고 부름.
- Normal vector, $\vec{T}^\prime(t)$는 tangent vector와 orthogonal함.
Unit tangent vector, $\vec{T}(t)$의 정의로부터 normal vector, $\vec{T}^\prime (t)$ 를 구하면 다음과 같음.
$$\begin{aligned} \vec{T}(t) &= \frac{\vec{r}^\prime (t)}{ \| \vec{r}^\prime (t)\| }\\ \| \vec{T}(t) \| &= 1 \rightarrow \left[ \vec{T}(t) \right]^2=1 \end{aligned}$$
- 위 식에서 $\left[\vec{T}(t)\right]^2=1$를 $t$에 대해 미분하면 다음과 같음.
$$
\begin{aligned}
2\vec{T}(t)\cdot\vec{T}'(t) &= 0 \\
\vec{T}(t)\cdot\vec{T}'(t) &= 0
\end{aligned}
$$ - 여기서 inner product가 0이라는 애기는 orthogonal(직교)하다는 뜻이며, unit tangent vector $\vec{T}(t)$와 orthogonal한 $\vec{T}^\prime(t)$를 normal vector라고 함.
Unit Normal(법선) Vector
- Normal vector 의 크기(L2-norm)가 1인 경우, unit normal vector라고 부름.
$$
\begin{aligned}
\vec{N}(t) = \frac{\vec{T}^\prime(t)}{ \| \vec{T}^\prime(t) \| }
\end{aligned}
$$
'... > Math' 카테고리의 다른 글
| [Statistics] Central Limit Theorem (0) | 2022.03.31 |
|---|---|
| [Statistics] Moment (Probability Moment) (0) | 2022.03.31 |
| [Math] Vector (1) (1) | 2022.03.28 |
| Softplus (0) | 2022.03.14 |
| [Math] Function (함수): 간략 정의 (0) | 2021.09.14 |